科研算法开发
目标:
培养高校学生的创新思维和实践能力,有助于提供学生的实践应用和工程能力,拓宽学术视野,增强自身就业竞争力。
培养高校学生的创新思维和实践能力,有助于提供学生的实践应用和工程能力,拓宽学术视野,增强自身就业竞争力。
案例:
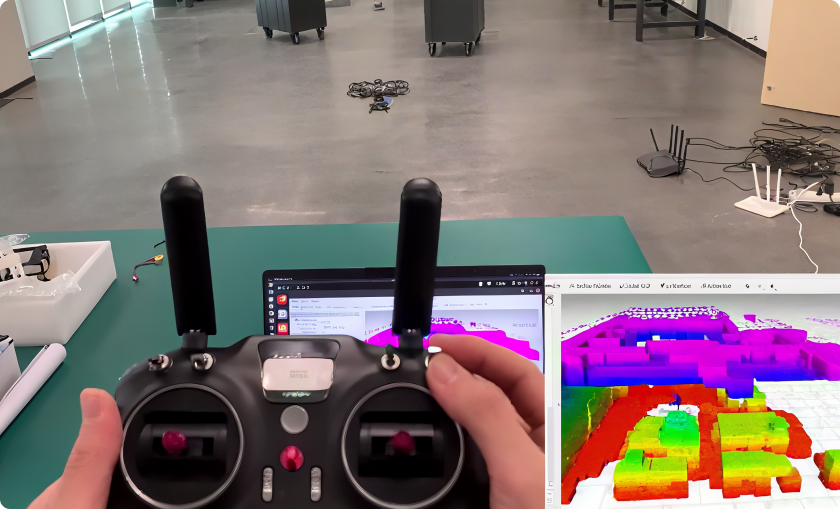
非凸α自主导航系统提供丰富的定位、控制、规划等接口用户可在平台测试开发多种移动机器人相关算法。
非凸α自主导航系统提供丰富的定位、控制、规划等接口用户可在平台测试开发多种移动机器人相关算法。
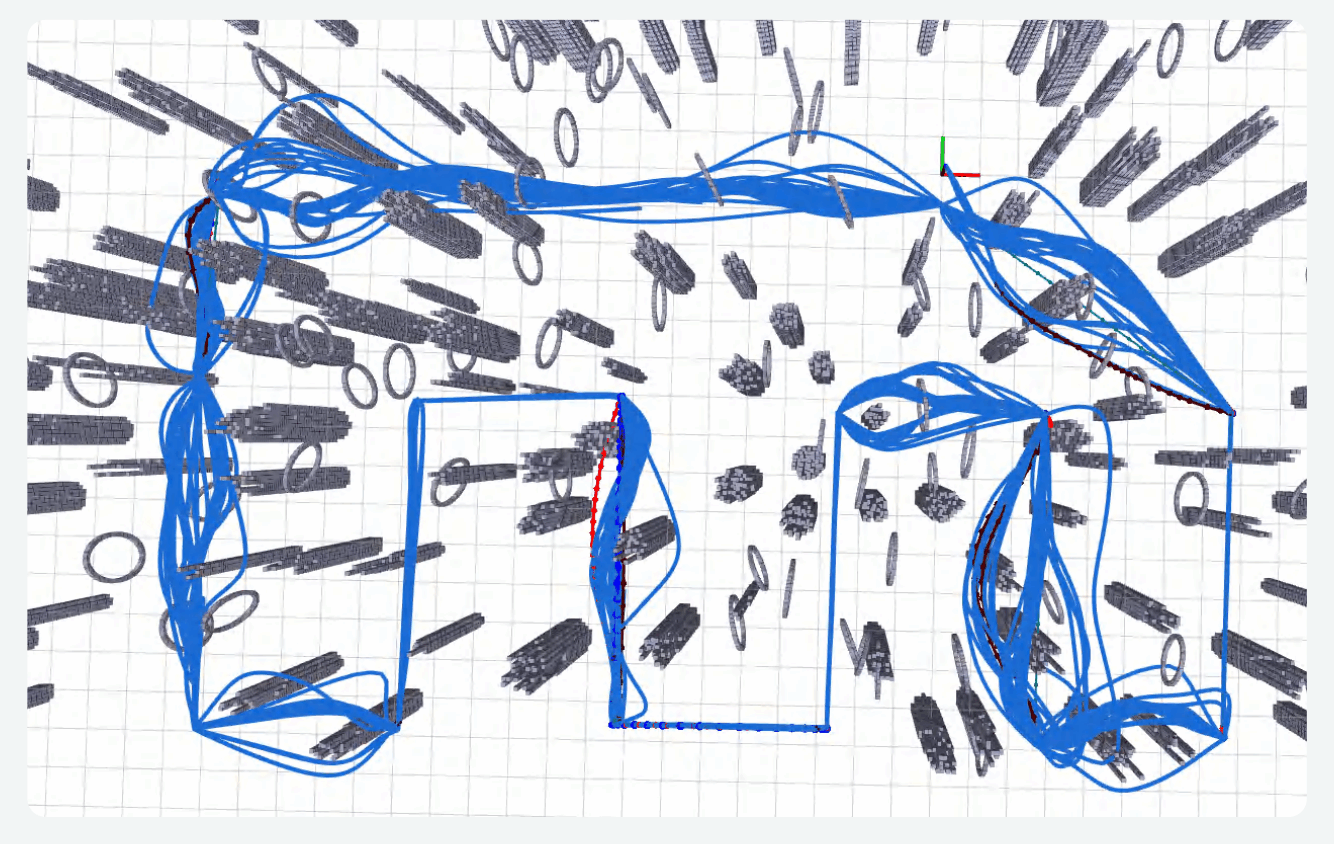 (仿真飞行鲁棒性测试)
(仿真飞行鲁棒性测试)