微分行业
产品介绍
行业应用
非凸教育
品牌介绍
产品介绍
解决方案
合作伙伴
前沿突破
关于我们
企业文化
创始人寄语
荣誉资质
联系我们
新闻动态
加入我们
校园招聘
服务与支持
常见问题
下载中心
客户服务
EN
首页
微分行业
产品介绍
行业应用
非凸教育
品牌介绍
产品介绍
解决方案
合作伙伴
前沿突破
关于我们
企业文化
创始人寄语
荣誉资质
联系我们
新闻动态
加入我们
校园招聘
服务与支持
常见问题
下载中心
客户服务
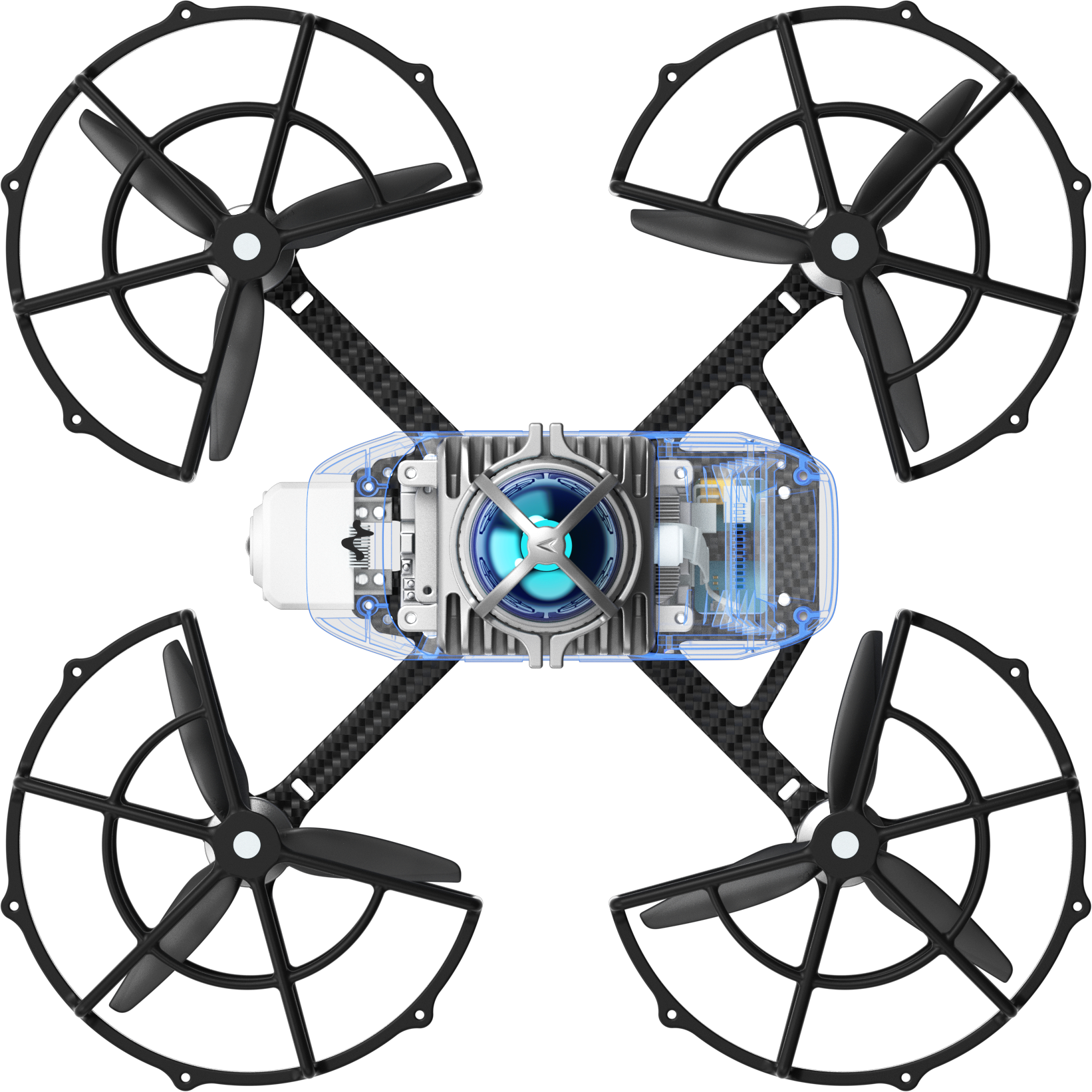
竞技级飞行机器人C5
C5竞技级飞行机器人,采用高性能工程塑料与碳纤维复合结构实现高抗撞性,支持算法二次开发与外观DIY
配套空地协同系统可实现飞行机器人与地面无人平台的跨维度协同作业,为飞行具身智能研究与机器人竞赛提供高可靠性开发平台。
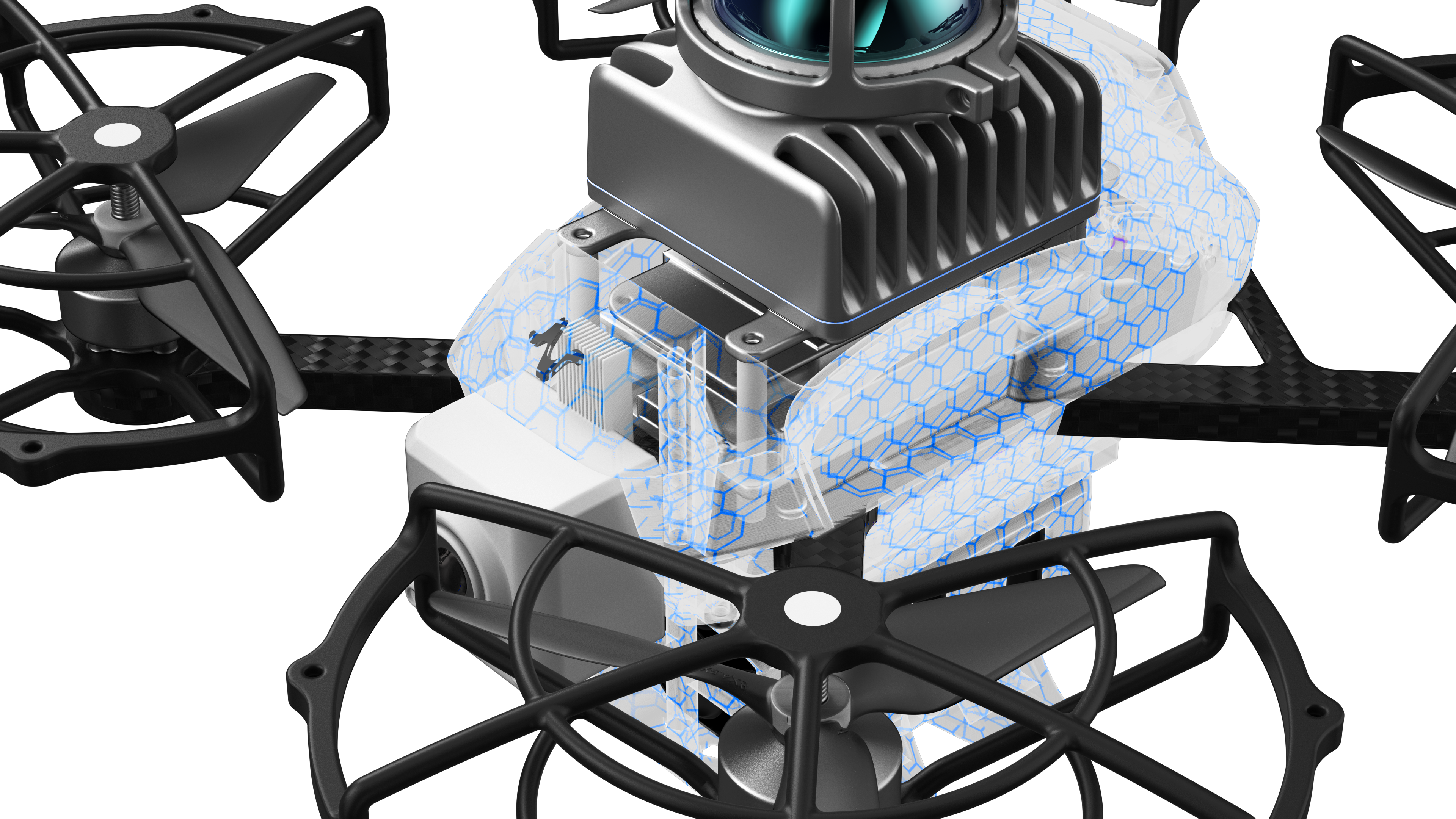
极致稳固,无惧炸机
机身主体采用高性能工程塑料+碳纤维打造,专为实验竞赛设计。结构刚性佳,耐撞耐摔,更能在复杂环境下保持稳健运行。
算法开源,可DIY外壳
从算法到外观同步开源。支持二次开发算法和DIY个性化组件,是理想的飞行创意平台。
空地一体,协同高效
配套一体化空地协同系统,实现飞行机器人与无人车、机器狗的“跨维度”配合。打破空间壁垒,开启从地面到天空的全方位探索视角。
复杂环境自主导航
飞行机器人基于Diff-Planner(Ego-Planner原版人马打造升级的优化轨迹算法)在结构化地图、动态障碍、密集树林、风扰、狭窄缝隙等未知复杂环境下进行自主导航任务 C5竞技级飞行机器人,充分展现其在真实动态环境中的定位、感知、决策、规划与控制能力。 为空中机器人在多场景、多领域的商业化落地提供关键技术验证平台,完成关键测试场景。
空地协同
从”空中单机巡检”到”空地联动”,飞行具身智能正打破单一平台局限,实现从广域感知到精准执行的一体化跨越!非凸空间空地一体化系统,通过算法规划飞行机器人自主巡检路径,识别目标并将坐标与信息同步至无人车;无人车接收指令后自主规划路径前往目标点,完成灭火、投送或复核作业,全程无人干预且不依赖GPS与外部基站。